


服務熱線
86-132-17430013


| 品牌 | 其他品牌 |
|---|
湖南回收西門子PLC模塊 湖南回收西門子PLC模塊
3D打印的下一階段可能是移動制造技術。位于新澤西州普林斯頓的西門子研究院已經研發出了一種外表形似蜘蛛的機器人原型。它們可以協同工作,打印出各種結構和表面,從而有可能加快飛機機身和船舶船身等大型復雜結構物的制造流程。
位于普林斯頓的西門子研究院實驗室內有大型蜘蛛出沒。人們發現它們在堆積一種散發甜味的粘稠物質。這些物質似乎一接觸到一種平滑、光亮的表層就會立即變干。雖然出現的蜘蛛越來越多,卻沒有人拉響警報。這其中自有原由……
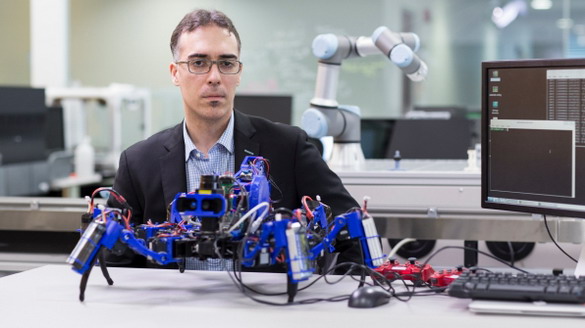
這些“蜘蛛”并非來自郁郁蔥蔥的普林斯頓周邊區域,而誕生于虛擬世界。如今,它們已走入現實,來到西門子研究院自動化與控制技術領域產品設計、建模和模擬研究小組負責人Livio Dalloro等人工作的地方。Dalloro的團隊稱這些“蜘蛛”為SiSpis,或西門子蜘蛛。借助自身裝載的*技術,它們有可能在將來變身為新型產業工人。
西門子研究院自動化與控制技術領域產品設計、建模和模擬研究小組負責人Livio Dalloro認為,借助自身裝載的*技術,這些“蜘蛛”有可能在將來變身為新型產業工人。
“SiSpis是西門子靈動制造系統(SiAMS)的一部分,它們代表著西門子研究院在普林斯頓開展的自主系統研究工作的核心。”Dalloro表示。他解釋道,從本質上講,這些像蜘蛛一樣的機器人其實是有腿的全自主增材制造裝置。他說:“我們打算使用多個自主機器人協同工作,以增材制造的方式生產出汽車車身、船舶船體和飛機機身等結構物。”增材制造,也叫3D打印,是通過逐層疊堆選定材料,生產或精制出產品或表面的技術。
協作是關鍵
當然,在像船舶船體這么大的結構物內表面疊加一層材料可能需要數百只“蜘蛛”共同完成。因此,問題的關鍵在于,這樣一支機器人 將如何共同工作?答案就是機器人的自主能力。Hasan Sinan Bank是這個項目的主要成員。他解釋說:“每只‘蜘蛛’都只能生產一個工件的一小部分。因此,我們試圖將這些機器人所要開展的合作類型加以概念化并進行優化。”Dalloro的團隊研發的算法可以助這項工作一臂之力。這些算法可用于規劃由多個機器人合作執行的任務。如此,兩個甚至更多“蜘蛛”就可以合作進行單個物體或區域的增材制造或表面加工。
為了做到這一點,這些機器人使用機載攝像頭和激光掃描器來解讀周邊環境。由于每個機器人都知道自己3D打印臂的活動范圍,它們能夠自主制造出自己所覆蓋的或平坦或起伏的區域部分。而其它機器人則使用相同的技術來制造相鄰區域。通過將每個區域劃分成垂直區塊,這些機器人能夠合作覆蓋十分復雜的幾何結構物,而不會漏掉任何區塊。Bank表示:“沒有任何其他人嘗試過使用移動制造技術來完成這樣的任務。”

項目旨在創建自主移動制造平臺原型。

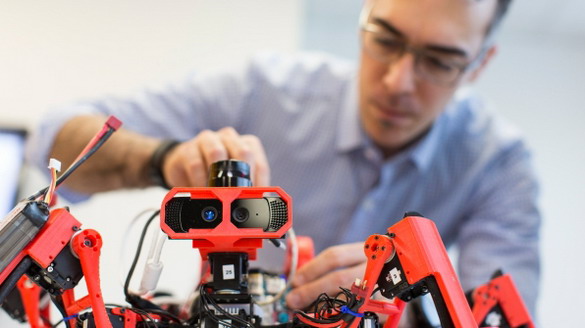
每次在虛擬世界里設計出蜘蛛機器人組件后,工程師都會用3D打印技術將之制作出來。

蜘蛛機器人使用機載攝像頭和激光掃描器來解讀周邊環境。
自主性也是這些蜘蛛機器人的特點之一。例如,這些機器人知道它們目前在特定環境內的具體位置。在使用約兩個小時后,當電池余量不足時,蜘蛛機器人將自行返回充電站。但在這之前,它會將數據發送給另一只剛充完電的機器人,以便后者緊接著執行它未完成的工作。同樣,每當遇到障礙物,蜘蛛機器人將自主找路繞過障礙物。西門子蜘蛛工人項目于2014年1月啟動。Dalloro指出:“這個項目的目的是創建自主制造機器平臺原型,它能夠理解任務,并將之劃分為多個子任務,分配給可用機器人,以合作、協調的方式進入制造過程,而無需顯式編程。”
借助西門子PLM軟件解決方案NX,以及Dalloro團隊開發的結合NX與ROS(機器人操作系統)的混合軟件,蜘蛛機器人迅速初具雛形。Dalloro表示:“除蜘蛛機器人的迷你電機和電纜是已有產品外,從機械部件到軟件等所有組件都是我們自行開發的。”與這個項目著眼于高級制造技術相契合的是,在虛擬世界里設計出蜘蛛機器人組件后,工程師們會用3D打印技術將它制作出來。
Dalloro團隊研發的算法可用于規劃由多個機器人合作執行的任務。由此,兩個甚至更多機器人可以合作進行單個物體或區域的增材制造或表面加工。
除此之外,這支團隊必須規劃機器人的行為。Bank說:“我們必須開發軟件工具來模擬機器人在團體中的行為。”這意味著研發團隊必須設法精確校正蜘蛛機器人的制造噴嘴。每只“蜘蛛”都配備了與傳統3D打印機的擠出機類似的裝置,但目前僅能使用一種叫聚乳酸的含玉米淀粉和甘蔗的打印材料。
這些蜘蛛機器人將走向何方?顯然,研究人員已經實現了他們初的目標:開發出具有大限度的自主性和低限度的編程要求的系統。Bank表示:“這項技術一旦發展成熟,就可用于制造幾乎任何物品。”